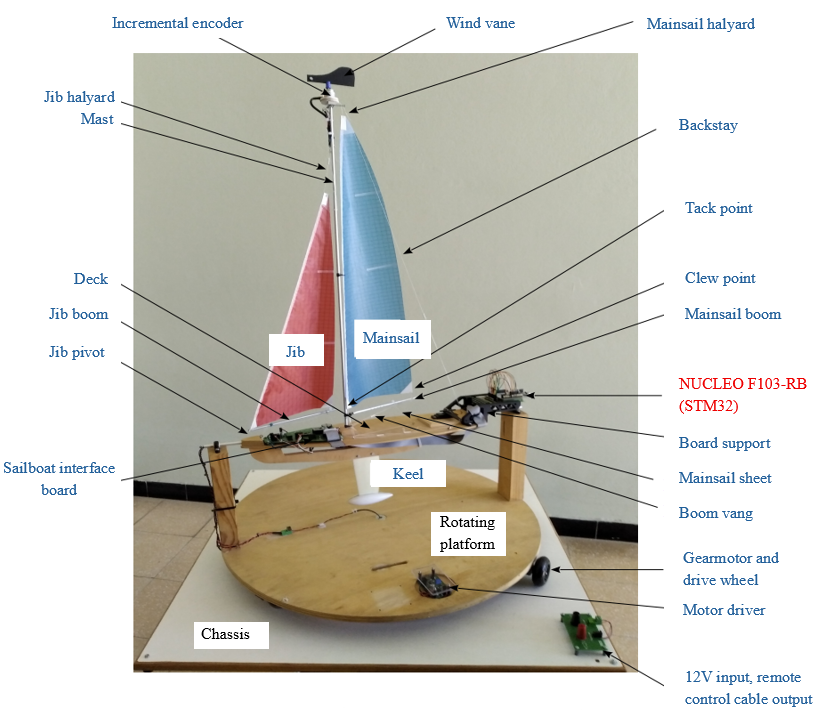
System Overview & Physical Platform
- The mechanical platform supports full 360° yaw rotation and free roll motion under wind-induced dynamics.
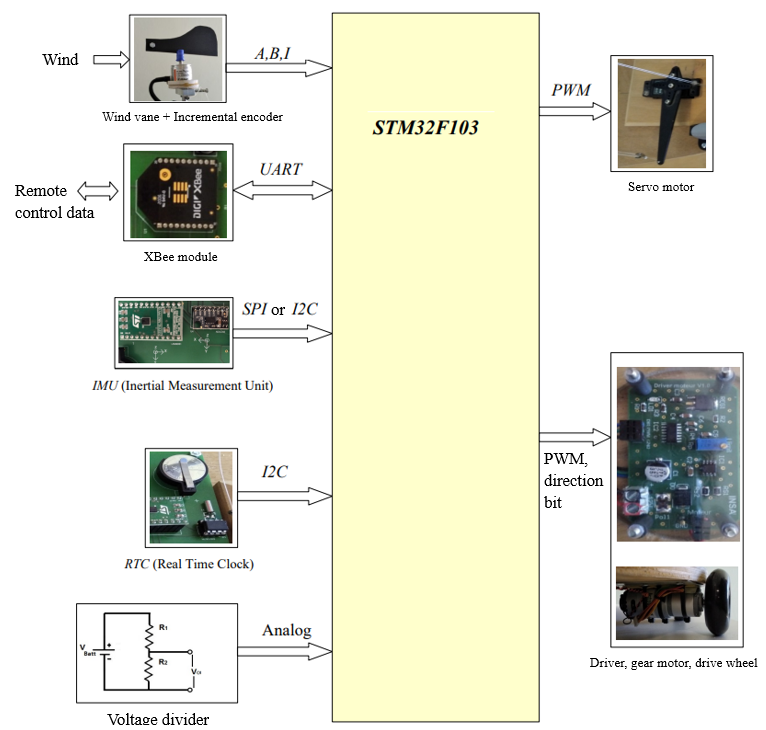
- The embedded objective is to coordinate sail trimming, controlled rotation, and remote communication on the same constrained controller.
- The project is defined as a hardware–software integration problem where mechanical behavior and electronics are co-engineered.