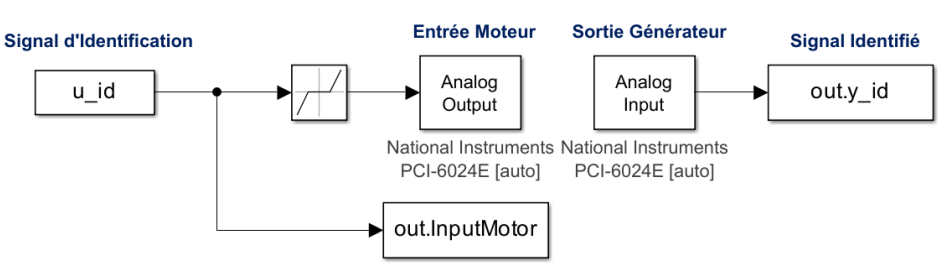
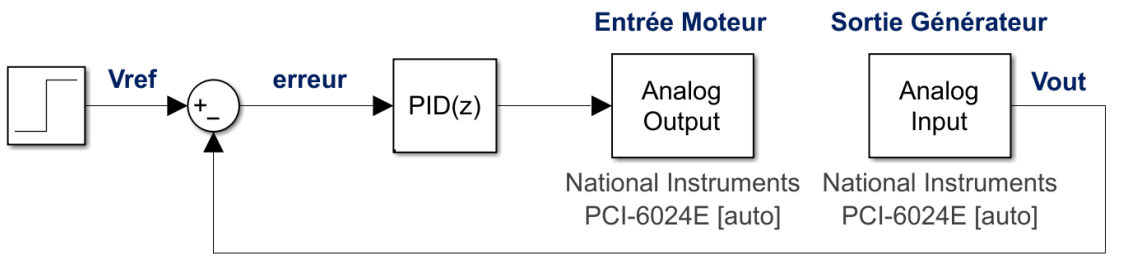
Experimental Setup
This setup implements a fully instrumented identification loop, where input excitation signals are generated in MATLAB/Simulink and applied through a National Instruments interface, while the generator output is measured in real time. This configuration enables reproducible experiments across multiple sampling rates, excitation signals, and load conditions.